Useless Surpise

Every year in the holiday season we celebrate the tradition of “Sinterklaas”. And for that we make a ‘surprise’ (Sur-pree-se), a personally made gift for someone, usually a creative representation of something hiding the actual gift. This year I wanted to make something more technical than a surprise made of cardboard and duck tape, and decided to create a personal version of the useless box. A useless box is a device with just one task: to turn itself off!
I stumbled upon Bart Venneker’s Useless Machine met Leeuwwhich featured an energy-saving design that cuts off power when idle. This was a perfect feature since my box would stay wrapped until opened. I also found inspiration from an escape room puzzle using magnets and reed switches, which I incorporated to add a game element to the gift.
Parts
To bring this project to life, I gathered the following components:
- Microcontroller: Arduino Nano
- Motors: SG90 Mini Servo, S3003 Servo
- Switches: Toggle Switch (MTS-202), Roller Microswitch, 4 Reed Switches
- Power: 9V Battery with clip
- Extras: LED, 100uF Capacitor, Resistors (1x 120Ω, 4x 10KΩ), 4 small magnets, Box (tea box from Action)
How It Works
Wiring
Based on my ideas I created the wiring diagram to start the build:
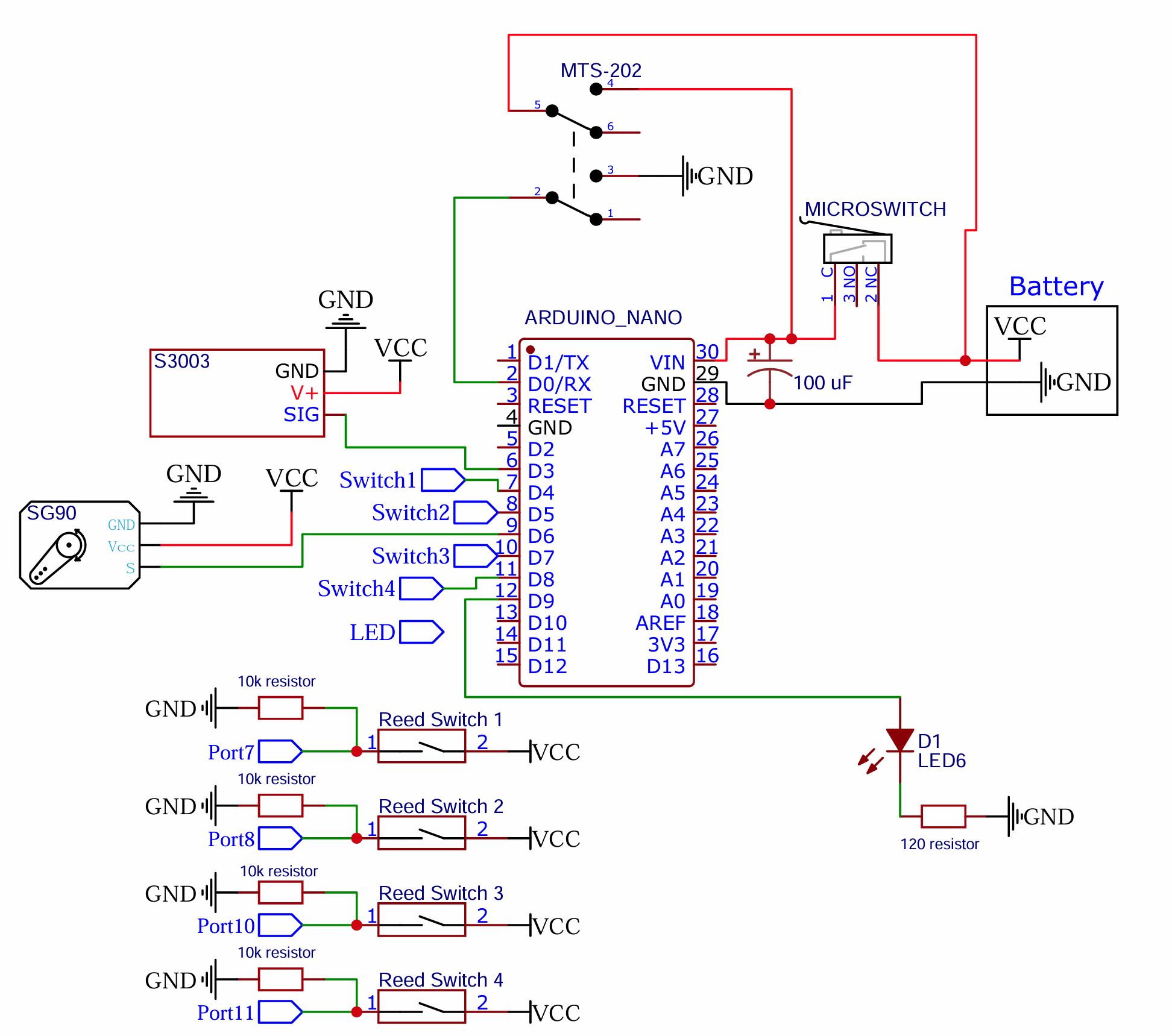 Fig.1 Wiring Diagram
Fig.1 Wiring Diagram
With this wiring the power of the battery powering the Nano will be cut off if the box is “in rest”.
The Microswitch will be placed under the hendel that opens and closes the lid of the box. By lowering this handle it wil close the microswitch, cutting the power.
 Fig.2 Microswitch
Fig.2 Microswitch
When the toggle switch is flipped, power flows to the Nano. The program then raises the lid handle just enough to release the Microswitch, keeping power running. The box can than switch the toggle switch to off again, and the Nano will still have power via the Microswitch.
If the box detects no activity (toggle switch isn’t flipped) for a set time, the handle lowers, pressing the Microswitch again and cutting off power.
The capacitor near the Nano’s VIN and GND pins prevents unwanted motor movements due to power fluctuations, according to the original project.
Adding the Game: Reed Switches and Magnets
Reed switches are magnetic-sensitive switches and were connected to digital pins (pins 4, 5, 6, and 7). When a magnet triggers the reed switch, the circuit closes, and the pin reads HIGH.
For the reed switched I Googled some more to find how I could connect them to the Nano. They need one end connected to VCC. The other end of the switch needs two wires, one goes via a 10K resistor to ground, and the second wire to a port of the Nano. I tested this with one Reed switch to confirmed if they work with this wiring using a simple test sketch:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
const int pinSwitch2 = 8; //Pin Reed
int reedSwitch2 = 0;
void setup() {
Serial.begin(9600);
pinMode(LED_BUILTIN, OUTPUT);
pinMode(pinSwitch2, INPUT);
Serial.println("READY!");
}
void loop() {
reedSwitch2 = digitalRead(pinSwitch2);
Serial.println(reedSwitch2);
if (pinSwitch2 == 1){
digitalWrite(LED_BUILTIN, HIGH);
} else {
digitalWrite(LED_BUILTIN, LOW);
}
}
Building and Testing
I started by testing the components on a breadboard, ensuring everything worked with the Arduino Nano. Step by step, I soldered the circuit, installed the motors, and tested the system at each stage.
Starting with the original code. I found that this didn’t work flawless for my setup. The servo’s had a different angle and the I adjusted the range for them.
The original code also contained a routine where where the arm was programmed to flip the switch when the door was closed.
The lid of the box had a windows made of glass. This turned out to be to heavy for the SG90 Mini Servo, so I removed the glass.
Game
For the game I wanted to use a map of the World. This map would be divided in six squares (as seen in figure 2). Behind four of the six squares I glued one of the Reed switches.
 Fig.3 Map of the World
Fig.3 Map of the World
The switches will react when a magnet is placed close to them. To give these magnets some extra grip I also glued some metal round behind the switches.
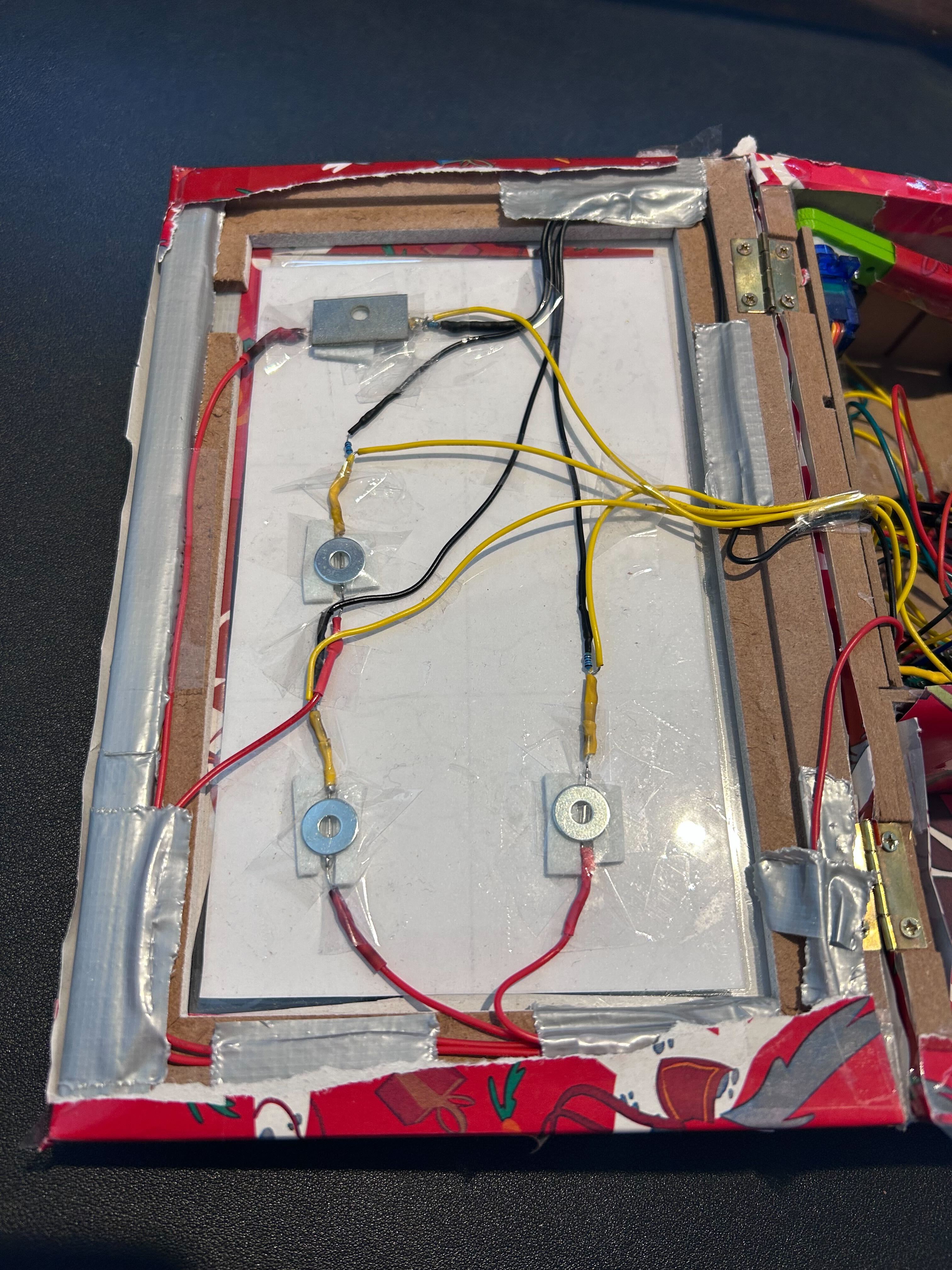 Fig.4 Reed Switches
Fig.4 Reed Switches
The magnets where placed in a small gift wrapper with a piece of cardboard, matching the size of the squares on the map. Attached to these gifts was a small poem, giving a hint to where the gift needed to be placed on the map.
Program Flow
After reeding, testing and adjusting the code it work perfect for my setup and I added the part for the reed switches.
With this the program flow is:
- When the toggle switch is flipped, the program checks if all reed switches are activated (magnets in correct place).
- If successful, the lid opens slowly, and the LED lights up. After a long delay the box will flip the toggle switch to off and close.
- If not, the box will flip the toggle switch to off immediately and close the lid.
- After a delay or inactivity, the box shuts off, cutting power.
Result
Personally, I really like the result. The surprise worked perfectly! The game added a bit of surprise to the ‘surpreese’.
 Fig.5 Wiring
Fig.5 Wiring
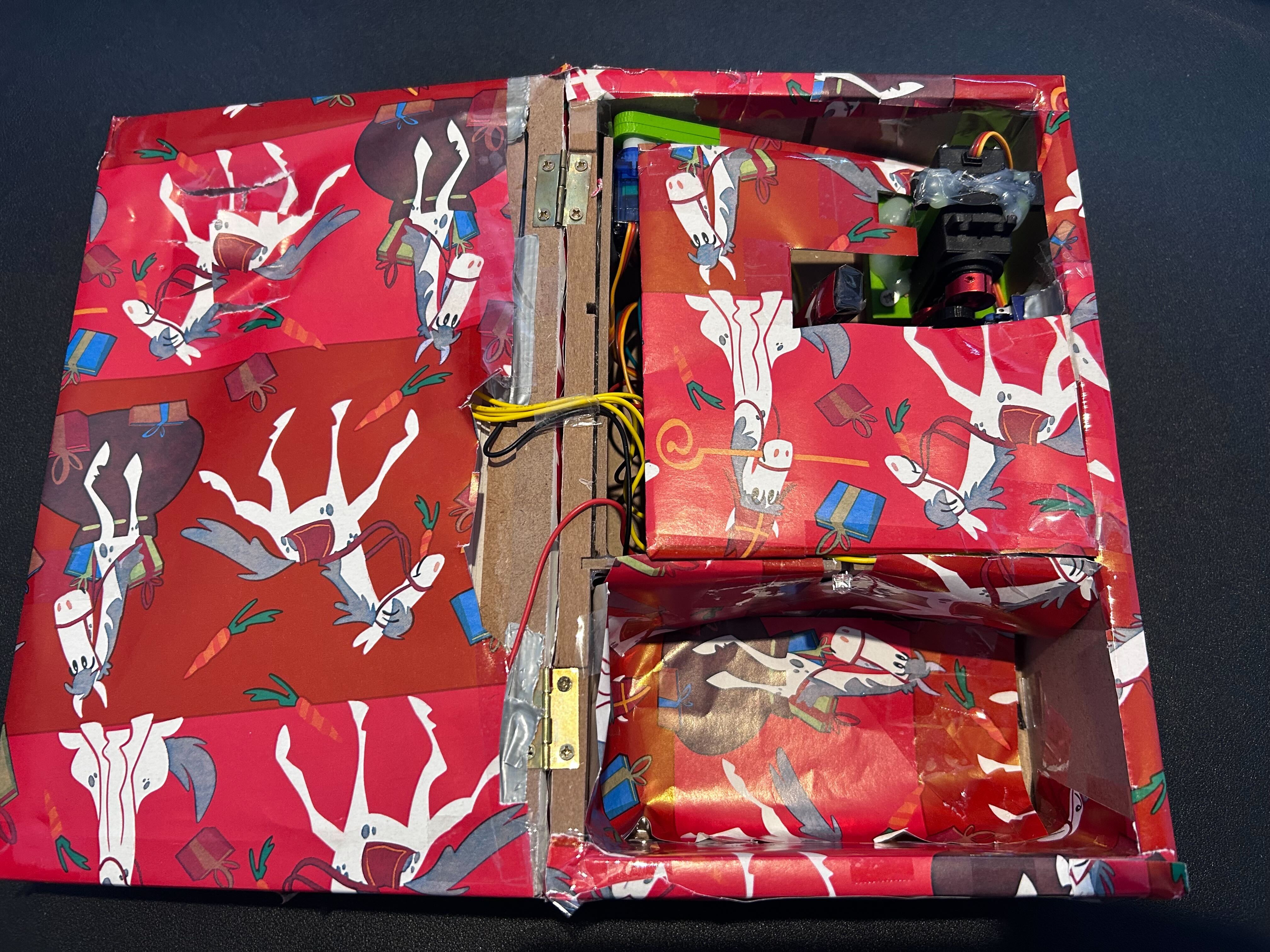 Fig.6 Inside the finished box
Fig.6 Inside the finished box
The Game isn’t Solved yet
The Game is Solved!
Improvements
The servo lifting the lid of the box couldn’t completely open the lid by the position I placed it. And I found out I couldn’t rotate the hendel anymore because of the box and the placement of the servo. If I would rebuild this, I would place the servo in such a way that if the puzzle was solved, it would completely open the box.
For now, it’s time to enjoy the holidays and let the box do what it does best: shut itself off!
And the wrapping could use some improvement….
Code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
#include <Servo.h>
#include <EEPROM.h>
const int pinSwitch1 = 7; //Pin Reed
const int pinSwitch2 = 8; //Pin Reed
const int pinSwitch3 = 10; //Pin Reed
const int pinSwitch4 = 11; //Pin Reed
int solved1 = 0;
int solved2 = 0;
int solved3 = 0;
int solved4 = 0;
#define doorClosed 50
#define doorOpen 0
#define doorPeek 20
#define armIn 190
#define armOut 375
#define swtch 2
#define light 12
Servo klepServo;
Servo armServo;
unsigned long timeout = millis();
byte doorPos = doorClosed;
byte armPos = armIn;
void setup() {
Serial.begin(9600);
pinMode(pinSwitch1, INPUT);
pinMode(pinSwitch2, INPUT);
pinMode(pinSwitch3, INPUT);
pinMode(pinSwitch4, INPUT);
pinMode(light, OUTPUT);
digitalWrite(light, LOW);
pinMode(swtch, INPUT_PULLUP);
klepServo.attach(9, 3100, 700);
armServo.attach(6, 2700, 544);
delay(100);
for (int x = 0; x < 10; x++) {
armServo.write(armIn);
klepServo.write(doorClosed);
delay(50);
}
klepServo.detach();
armServo.detach();
}
void loop() {
delay(500);
if (digitalRead(pinSwitch1) == HIGH) {
Serial.println("switch 1 high");
solved1 = 1;
}
if (digitalRead(pinSwitch2) == HIGH) {
Serial.println("switch 2 high");
solved2 = 1;
}
if (digitalRead(pinSwitch3) == HIGH) {
Serial.println("switch 3 high");
solved3 = 1;
}
if (digitalRead(pinSwitch4) == HIGH) {
Serial.println("switch 4 high");
solved4 = 1;
}
// Turn off after 60 seconds of no activity
if (millis() - timeout > 60000) {
armServo.detach();
digitalWrite(light, LOW);
peek_1();
// Move the doorServo to lowest position to press the microswitch and cut off the battery power
Serial.println("lowest position");
delay(500);
for (int x = 0; x < 10; x++) {
klepServo.write(75);
delay(50);
}
}
if (!digitalRead(swtch)) { // If the switch is in the UP position ..
// First check if solved
if (solved()) {
// no need to do anything, power will be off
} else {
// not solved, switch
Serial.println("Switch is up");
timeout = millis(); // reset the timeout value
// digitalWrite(light,HIGH); // light on
int pn = EEPROM.read(0); // read the eeprom to get the next routine
klepServo.attach(9, 3100, 700); // attach the servos
armServo.attach(6, 2700, 544);
switch (pn) {
case 1: delay(500); routine_1(); EEPROM.write(0, 2); break;
case 2: delay(500); routine_2(); EEPROM.write(0, 3); break;
case 3: delay(500); routine_3(); EEPROM.write(0, 4); break;
case 4: delay(500); routine_4(); EEPROM.write(0, 5); break;
case 5: delay(500); routine_5(); EEPROM.write(0, 6); break;
case 6: delay(500); routine_6(); EEPROM.write(0, 7); break;
case 7: delay(500); routine_7(); EEPROM.write(0, 8); break;
case 8: delay(500); routine_8(); EEPROM.write(0, 9); break;
case 9: delay(500); routine_9(); EEPROM.write(0, 1); break;
default: EEPROM.write(0, 1); break;
}
klepServo.detach(); // detach the servos
armServo.detach();
}
}
}
void setDoor(byte pos, byte speedDelay) {
Serial.println("Set Door " + pos);
if (pos > doorPos) {
for (int p = doorPos; p < pos ; p++) {
klepServo.write(p);
delay(speedDelay);
}
}
else {
for (int p = doorPos; p > pos ; p--) {
klepServo.write(p);
delay(speedDelay);
}
}
doorPos = pos;
}
void setArm (byte pos, byte speedDelay) {
Serial.println("Set Arm");
if (pos > armPos) {
for (int p = armPos; p < pos ;) {
p = p + 5;
armServo.write(p);
delay(speedDelay);
}
}
else {
for (int p = armPos; p > pos ;) {
p = p - 5;
armServo.write(p);
delay(speedDelay);
}
}
armPos = pos;
}
bool solved() {
if (solved1 == 1 && solved2 == 1 && solved3 == 1 && solved4 == 1) {
digitalWrite(light, HIGH); // light on
klepServo.attach(9, 3100, 700);
// Move the doorServo to highest position
Serial.println("solved, highest position");
delay(500);
setDoor(doorOpen, 10);
delay(30000);
solved1 = 0;
solved2 = 0;
solved3 = 0;
solved4 = 0;
if (!digitalRead(swtch)) { // If the switch is in the UP position ..
armServo.attach(6, 2700, 544);
flipSwitchSlow(100);
// flipSwitchFast();
}
delay(500);
armServo.detach();
// Move the doorServo to lowest position to press the microswitch and cut off the battery power
Serial.println("Solved, lowest position");
digitalWrite(light, LOW); // light on
delay(500);
for (int x = 0; x < 10; x++) {
klepServo.write(75);
delay(50);
}
return true;
} else {
return false;
}
}
void peek_1() {
Serial.println("Peek 1");
klepServo.attach(9, 3100, 700);
setDoor(doorPeek, 20);
delay(2000);
setDoor(doorClosed, 10);
}
void flipSwitchSlow(int spDelay) { // 25 is slow, 50 or 100 is even slower
Serial.println("flipSwitchSlow");
byte p = armPos;
while (!digitalRead(swtch)) { // If the switch is in the UP position ..
p = p - 5;
armServo.write(p);
delay(spDelay);
}
armPos = p;
setArm(armIn, spDelay);
armPos = armIn;
}
void flipSwitchFast() {
Serial.println("flipSwitchFast");
for (byte x = 0; x < 15; x++) {
armServo.write(1);
delay(50);
if (digitalRead(swtch)) break;
}
for (byte x = 0; x < 15; x++) {
armServo.write(armIn);
delay(50);
}
Serial.println("Arm in");
armPos = armIn;
}
void doorOpenFast() {
Serial.println("doorOpenFast");
for (byte x = 0; x < 10; x++) {
klepServo.write(doorOpen);
delay(25);
}
doorPos = doorOpen;
}
void doorCloseFast() {
Serial.println("doorCloseFast");
for (byte x = 0; x < 10; x++) {
klepServo.write(doorClosed);
delay(25);
}
doorPos = doorClosed;
}
void klepper() {
Serial.println("klepper");
for (byte y = 0 ; y < 5 ; y++) {
for (byte x = 0; x < 10; x++) {
klepServo.write(doorPeek);
delay(15);
}
for (byte x = 0; x < 10; x++) {
klepServo.write(doorClosed);
delay(15);
}
}
}
void setArmFast(byte pos, byte speedDelay) {
Serial.println("setArmFast");
for (byte x = 0; x < 10; x++) {
armServo.write(pos);
delay(speedDelay);
}
armPos = pos;
};
void armPause(int d) {
Serial.println("armPause");;
armServo.detach();
delay(d);
armServo.attach(6, 2700, 544);
delay(100);
}
void routine_1() {
// open the door
Serial.println("Routine 1");
setDoor(doorOpen, 10);
flipSwitchSlow(100);
setDoor(doorClosed, 10);
armServo.detach();
delay(2000);
// check!
doorOpenFast();
delay(1000);
doorCloseFast();
}
void routine_2() {
Serial.println("Routine 2");
doorOpenFast();
flipSwitchFast();
doorCloseFast();
}
void routine_3() {
Serial.println("Routine 3");
setDoor(doorOpen, 10);
// flip the switch
setArmFast(armOut, 50);
// hold the swich down for a moment
armPause(1000);
// lift the arm a bit
for (byte r = 0; r < 2; r++) {
setArmFast(armOut + 45, 10);
delay(250);
setArmFast(armOut, 10);
delay(800);
}
armPause(1000);
// arm back inside
setArmFast(armIn, 50);
doorCloseFast();
}
void routine_4() {
Serial.println("Routine 4");
routine_2();
delay(700);
check_3();
}
void routine_5() {
Serial.println("Routine 5");
routine_2();
delay(500);
klepper();
}
void routine_6() {
Serial.println("Routine 6");
setDoor(doorOpen, 50);
setArm(armOut + 30, 50);
delay(500);
setArmFast(armOut, 50);
setArmFast(armOut + 40, 50);
delay(500);
setArmFast(armIn, 50);
doorCloseFast();
routine_2();
}
void routine_7() {
Serial.println("Routine 7");
doorOpenFast();
delay(500);
setArmFast(armOut, 50);
delay(100);
flipSwitchFast();
doorCloseFast();
delay(100);
armPause(2000);
check_2();
}
void routine_8() {
Serial.println("Routine 8");
setDoor(doorPeek, 10);
delay(700);
doorCloseFast();
setDoor(doorPeek, 10);
delay(1500);
doorOpenFast();
flipSwitchFast();
doorCloseFast();
armServo.detach();
klepServo.detach();
delay(1000);
klepServo.attach(9, 3100, 700);
delay(100);
setDoor(doorPeek - 20, 10);
delay(2000);
doorCloseFast();
}
void routine_9() {
Serial.println("Routine 9");
setDoor(doorOpen, 50);
flipSwitchSlow(100);
doorOpenFast();
setArmFast(armOut, 50); setArmFast(armOut + 110, 50);
setArmFast(armOut, 50); setArmFast(armOut + 110, 50);
setArmFast(armOut, 50); setArmFast(armIn, 50);
doorCloseFast();
}
void check_2() {
Serial.println("Check 2");
doorOpenFast();
setArmFast(armOut + 70, 50);
armPause(1500);
setArmFast(armIn, 50);
delay(100);
doorCloseFast();
}
void check_3() {
Serial.println("Check 3");
doorOpenFast();
setArmFast(armOut, 50);
armPause(1500);
if (!digitalRead(swtch)) {
routine_2();
doorOpenFast();
}
setArmFast(armOut + 110, 50);
delay(100);
setArmFast(armOut, 50);
armPause(1500);
if (!digitalRead(swtch)) {
routine_2();
}
setArmFast(armIn, 50);
klepServo.attach(9, 3100, 700);
delay(100);
doorCloseFast();
}